多旋翼动量定理
惯性系
因为$F_k$是体轴系下多旋翼的升力,所以要左乘旋转矩阵转换到地理坐标系下
同时,因为$F_k$都是垂直于机体平面,沿体轴$z_b$方向,所以旋转矩阵只需要最后一列,展开写就是
体轴系
$mg$是地理坐标系下的,左乘旋转矩阵的转置转换到体轴系
写成矩阵形式,体轴系下角速度为$\omega_b = \begin{bmatrix}p & q & r\end{bmatrix}^\mathrm{T}$
多旋翼动量矩定理
体轴系
这里定义$z$轴垂直于机身向下
$\hat{\omega} \sum_{k=1}^{4}{I_k\omega_k}$称为陀螺力矩
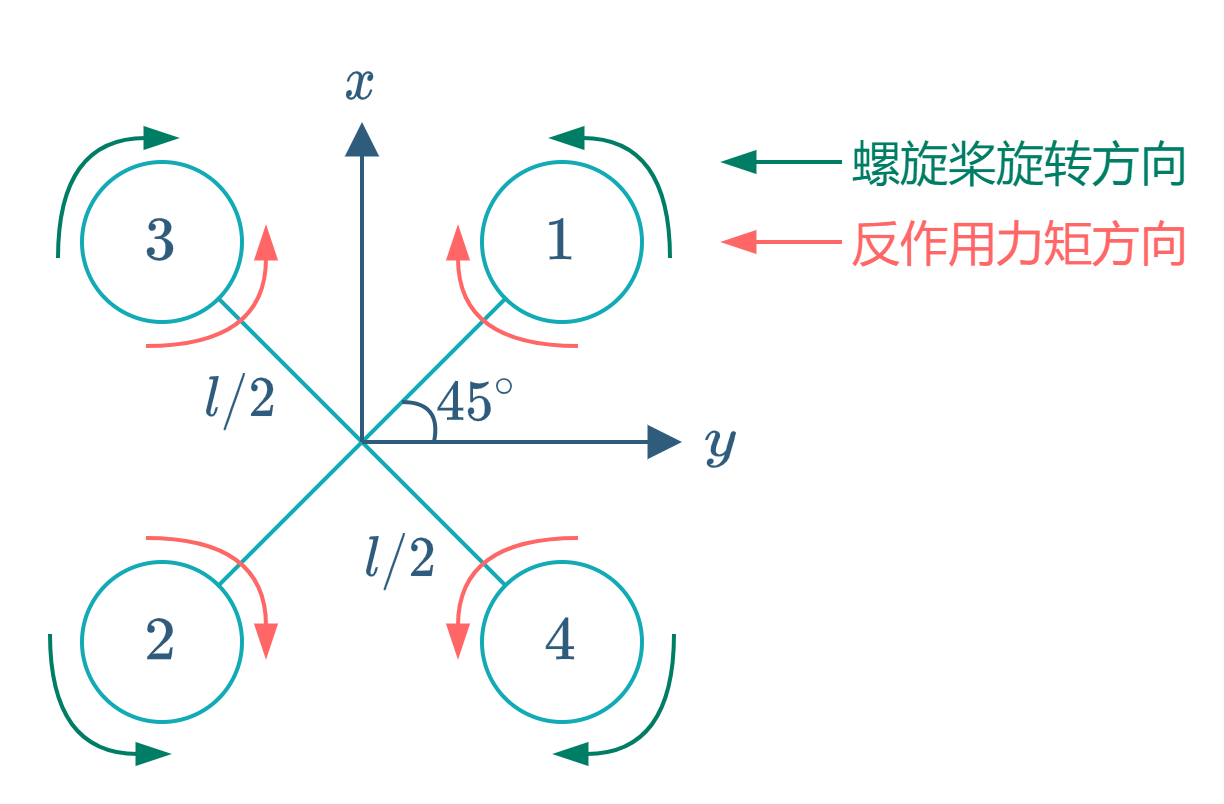
$\omega_1 = \begin{bmatrix}0\\0\\ -\Omega_1 \end{bmatrix}\quad\omega_2 = \begin{bmatrix}0\\0\\ -\Omega_2 \end{bmatrix}\quad\omega_3 = \begin{bmatrix}0\\0\\ \Omega_3 \end{bmatrix}\quad\omega_4 = \begin{bmatrix}0\\0\\ \Omega_4 \end{bmatrix}$
$I_k$是螺旋桨的转动惯量,因为旋翼角速度垂直于自身,所以只需考虑旋翼$z$轴的转动惯量
所以
所以
$\tilde{\tau}_k$是电机给螺旋桨的扭矩
$\tilde{\tau}_1 = \begin{bmatrix}0\\0\\ -\tau_1 \end{bmatrix}\quad\tilde{\tau}_2 = \begin{bmatrix}0\\0\\ -\tau_2 \end{bmatrix}\quad\tilde{\tau}_3 = \begin{bmatrix}0\\0\\ \tau_3 \end{bmatrix}\quad\tilde{\tau}_4 = \begin{bmatrix}0\\0\\ \tau_4 \end{bmatrix}$
所以机体动量矩定理展开就是


