4. 反扭力与偏航运动
基本原理:作用力与反作用力
多旋翼的动力系来源于高速电机带动螺旋桨转动而产生的拉力。假设电机带动螺旋桨顺时针运动,由于桨叶螺距对空气作用的效果,会产生一个向下的推力与水平方向的推力,如下图: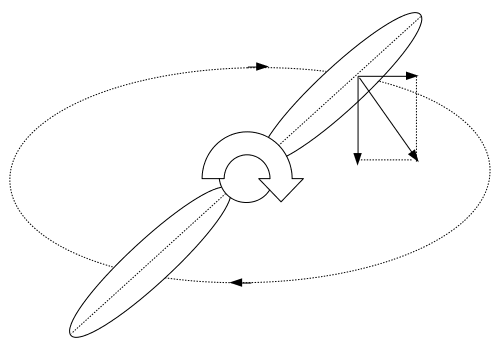
其中向下的推力是桨对空气的作用力,根据反作用力原理,空气就会对桨产生一个向上的推力。这就是空气对桨进而作用到机身垂直方向的拉力。而水平方向对空气的推力同样会产生一个空气对桨的反作用力,方向与作用力相反,其作用到多旋翼的轴臂上,就产生了我们所说的反扭力,也称反扭力矩。
根据多旋翼结构上的对称性,假设四个电机转动方向同,它们都是顺时针转动,那么就会对四个轴臂产生逆时针的四个反扭力,而这四个力作用在轴臂上时,使得机身会以自身中心为转轴进行旋转。就是说这四个反扭力的方向都是垂直于轴臂的,也就是我们通常所说的力矩。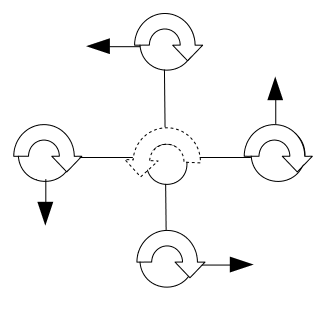
为了克服无人机的自旋,我们可以让对角线上的两个电机转动方向相同,而让相邻的两个电机转动方向相反,使它们所产生的反扭矩相互抵消,无人机就不会再出现自旋了。如下图: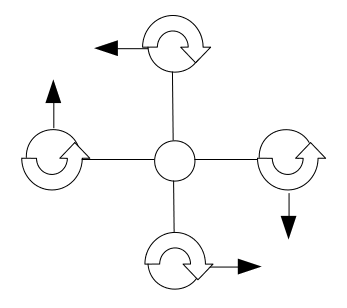
但是我们并不希望永远消除反扭矩,而是希望可以通过控制使其产生偏航运动,于是我们可以根据需要适当地同时增加电机0和电机2的转速,并同时减小电机1和电机3的转速。这样飞机整体向上的拉力不变,而电机0和电机2产生的反扭矩大于电机1和电机3产生的反扭矩,所以飞机会按逆时针方向作偏航运动。如下图: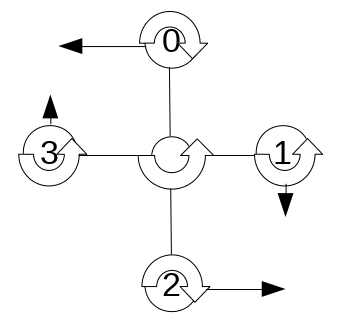
而对于偏航运动(yaw)的加速度,也就是偏航角加速度$\ddot{\psi}$等于力矩$M$除以转动惯量$I$,即:


